▶ PROJECT DATA LOADED...
Introduction
As part of my internship, I developed a full-body tracking system using electromagnetic field (EMF) technology. This project involved end-to-end development from hardware design and assembly to data collection, model training, and system calibration, resulting in a high-precision 6-DOF pose estimation system.
Project Overview
The system uses electromagnetic field sensing with 3D coil antennas and receivers to track body position and orientation. I was responsible for the complete development cycle, from designing and building the hardware to collecting training data and developing machine learning models for pose prediction.
Demo Videos
Tracking Demo V1
Tracking Demo V2
Key Contributions
- ▶Hardware Design & Assembly: Designed the Helmholtz cage in OnShape and built the physical structure for generating controlled electromagnetic fields
- ▶Circuit Design & Soldering: Designed and assembled the 3D coil antenna arrays and receiver circuits, including all PCB work and component soldering
- ▶Data Collection: Collected comprehensive training datasets by systematically varying positions and orientations within the calibrated field
- ▶Machine Learning Model: Trained models to predict 6-DOF poses from EMF sensor readings
- ▶System Calibration: Developed and performed calibration procedures to ensure accurate field generation and sensor readings
- ▶Precision Achievement: Achieved 1cm positional precision and 5-degree angular precision in pose estimation
Technical Approach
The system operates by generating controlled electromagnetic fields using a Helmholtz cage and measuring field strength and orientation using 3D coil antennas. The collected sensor data is processed through machine learning models to predict accurate 6-DOF poses (position and orientation) of tracked objects.
Key technical components included:
- ▶Helmholtz cage design for uniform field generation
- ▶3D coil antenna arrays for multi-axis field sensing
- ▶Custom receiver circuits for signal processing
- ▶Data collection protocols for training dataset generation
- ▶Machine learning pipeline for pose prediction
Results
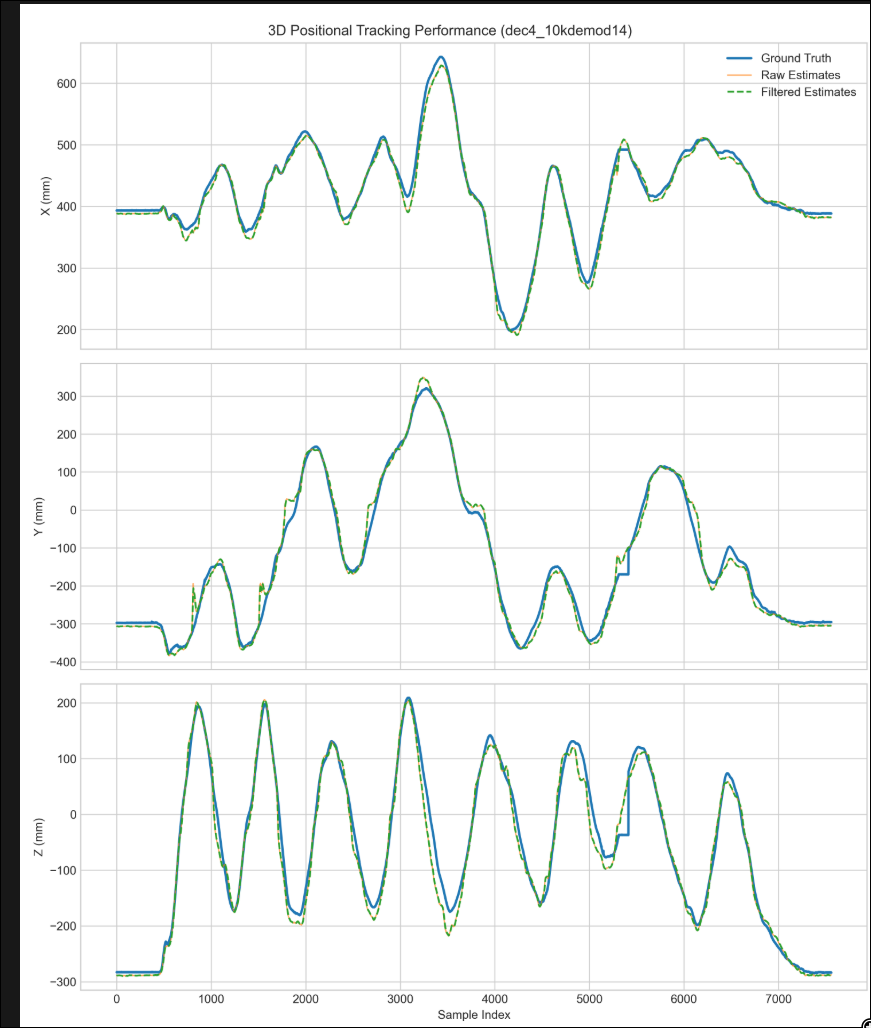
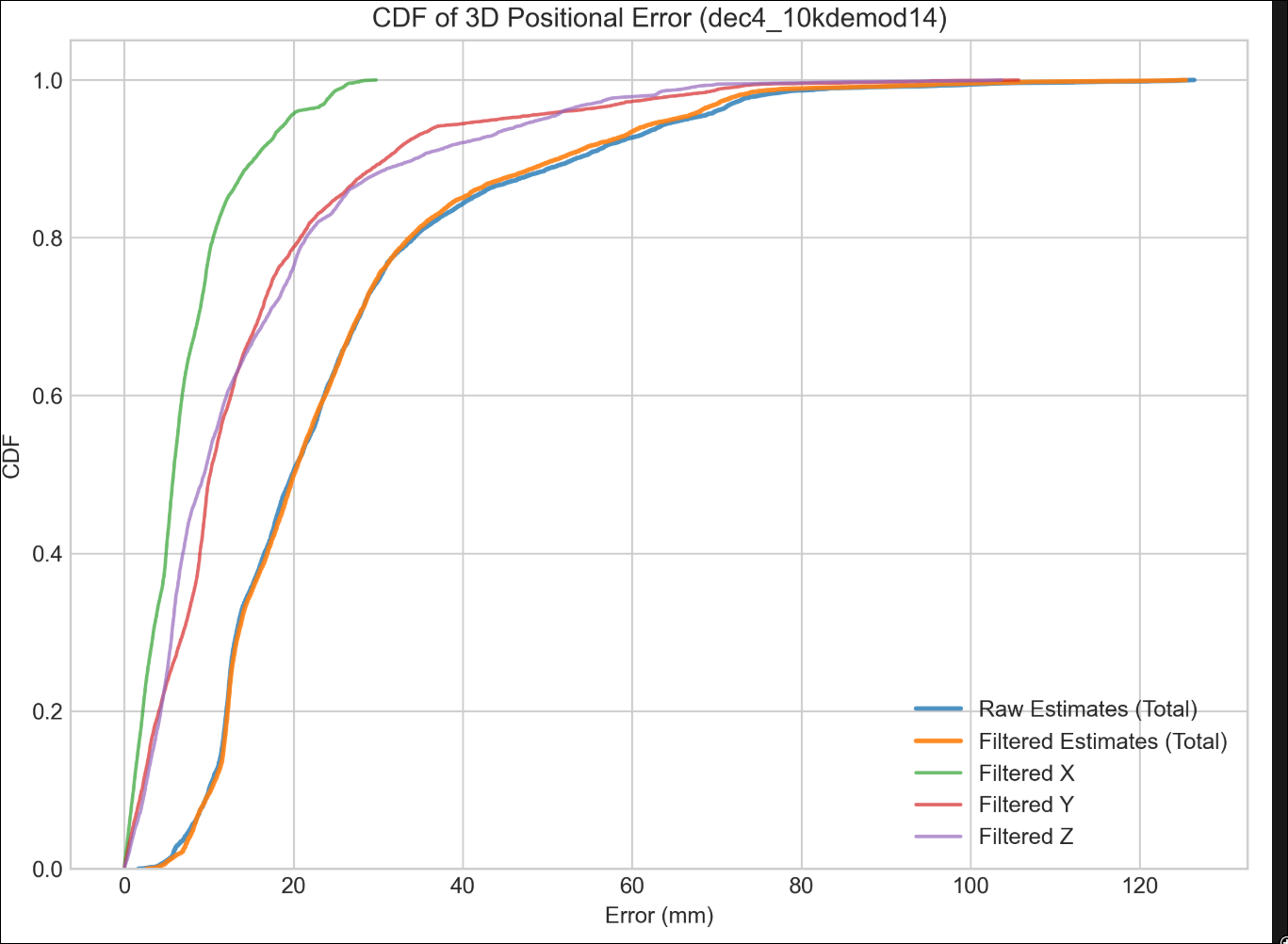
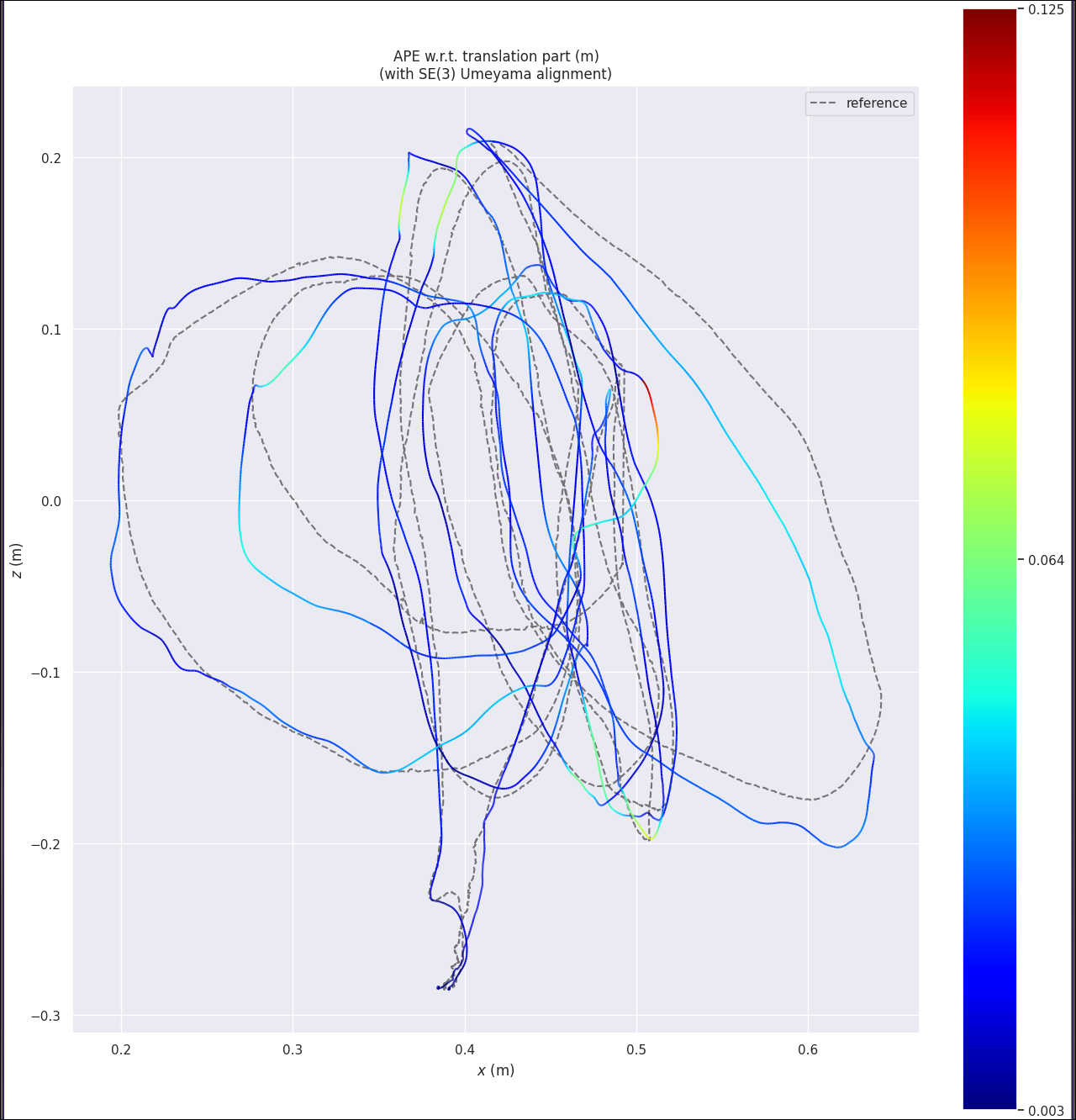
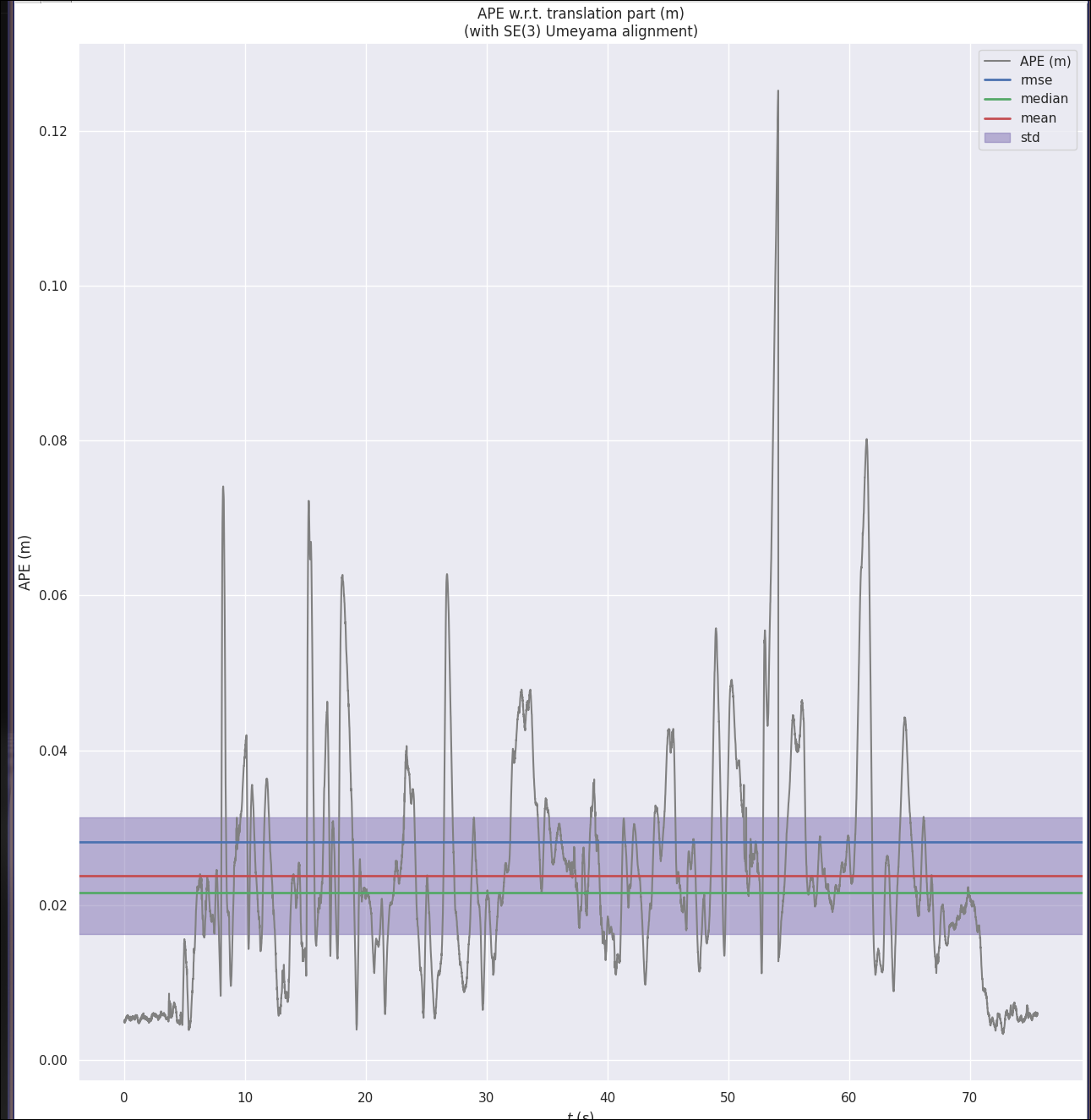
The system achieved high-precision tracking with:
- ▶Positional Accuracy: 1cm precision
- ▶Angular Accuracy: 5-degree precision
- ▶6-DOF Tracking: Full position and orientation estimation
Impact
This work contributed to advanced motion tracking capabilities, with applications in motion capture, virtual reality, and robotics. The end-to-end development process demonstrated skills in hardware design, embedded systems, data science, and machine learning.
Note
This project was completed as part of my internship, so I'm unable to share detailed technical implementation details, schematics, or source code. However, I'm happy to discuss the high-level approach, design decisions, and challenges encountered during development.